1. Modelul Behrens-Feichtinger
O serie întreagă de modele „fizice” microeconomice au fost elaborate, dintre acestea unele relativ simple. Ca extensia la economie a modelului neliniar Richardson a cursei înarmărilor [16], pentru care controlul prin aplicarea forţei stabilizatoare poate fi realizat în condiţii optime [10], modelul Behrens-Feichtinger, se referă la două firme având strategii asimetrice de investiţie.
Modelul se referă la
evoluţia vânzărilor (xn şi yn) a două firme competitive
pe aceeaşi piaţă de bunuri (cu strategii de investiţie asimetrică şi activă
pentru ambele firme). Dacă o firmă nu investeşte, în publicitate, cercetare,
re-tehnologizare şau dezvoltare este de aşteptat ca vânzările firmei
respective să scadă exponenţial, cu un factor ce caracterizează situaţia
concretă de pa piaţă a firmei, şi fiecare firmă are posibilitatea să
investească pentru a-şi creşte vânzările. Fiecare firmă are o abordare
diferită a strategiei de investiţie, firma X investeşte numai dacă are un
avantaj asupra firmei Y, iar cealaltă firmă dor dacă are o poziţie
dezavantajoasă. Dacă firma X este mai mică şi nu investeşte – se comportă
defensiv, iar firmaY, fiind mai mare, dacă este superioară competitorilor, nu
investeşte nici ea– se comportă agresiv. Putem deci descrie o evoluţia a
vânzărilor celor două firme, într-o scală discretă de timp -
![]() reprezentând valoarea vânzărilor firmei X la momentul n
temporal – prin:
reprezentând valoarea vânzărilor firmei X la momentul n
temporal – prin:
![]() ,
,
![]() .
.
cu
a
şi
b
(0 <
a,
b
<
1) fiind ratele temporale la care vânzările ambelor fire scad
în absenţa investiţiilor (scădere exponenţială). Ideal funcţia
![]() este o funcţie treaptă definită ca fiind zero pentru
este o funcţie treaptă definită ca fiind zero pentru
![]() şi egală cu a pentru
şi egală cu a pentru
![]() , dar funcţia treaptă poate fi aproximată cu
, dar funcţia treaptă poate fi aproximată cu
![]() , unde c caracterizează panta trecerii de la 0 la
a pentru funcţie (
, unde c caracterizează panta trecerii de la 0 la
a pentru funcţie (![]() reconstituie funcţia treapta), si măsoară gradul de
neliniaritate.
reconstituie funcţia treapta), si măsoară gradul de
neliniaritate.
2 Dezvoltarea modelului microeconomic
Pentru a adapta modelul microeconomic la condiţii de evoluţie dinamică mai apropiate de condiţiile reale vom introduce o serie de modificări care au ca scop dezvoltarea acestui model matematic şi extinderea aplicabilităţii sale.
Pentru început propunem adăugarea unui termen aleator privind cunoaşterea
diferenţei dintre vânzările celor două firme, aşa cum se întâmplă în
realitate, nu întotdeauna avem informaţia corectă despre vânzările firmei
concurente, ci doar informaţii având un anumit grad de probabilitate. De
aceea funcţia neliniară ce modelează declanşarea alocării de fonduri către
investiţii o vom modifica folosind o variabilă aleatoare distribuită
Gaussian ![]() (de medie c şi varianţă
(de medie c şi varianţă
![]() ), ce măsoară gradul de incertitudine privind cunoaşterea
vânzărilor concurente,
), ce măsoară gradul de incertitudine privind cunoaşterea
vânzărilor concurente,
![]() .
.
Natura distribuţiei poate să nu fie Gaussiană, dar acest lucru va fi analizat ulterior. Termenul este echivalent cu introducerea unui zgomot decizional privind momentul la care va avea loc o anumită investiţie.
![]() ,
,
Termenul fiind echivalent cu introducerea unui zgomot în valoarea investiţiilor.
![]() ,
, ![]()
unde indicele superior
face referire la agentul comercial, pe piaţă fiind M astfel de agenţi.
Cuplarea se face prin termenul ![]() , presupunând că piaţa este o piaţă cu cerere „fixă” sau
lent variabilă, V reprezentând valoare cererii întregii pieţe pentru
portofoliul de produse-servicii considerate. Desigur, într-un model mai
elaborat, valoarea acestei mărimi va putea depinde de suma investiţiilor
agenţilor comerciali (prin generarea şi condiţionarea interesului pentru
produse...), de mărimi care să vină din exteriorul sistemului considerat,
creşterea sau scăderea puterii de cumpărare, a oportunităţilor sau modificarea
legislaţiei, etc.
, presupunând că piaţa este o piaţă cu cerere „fixă” sau
lent variabilă, V reprezentând valoare cererii întregii pieţe pentru
portofoliul de produse-servicii considerate. Desigur, într-un model mai
elaborat, valoarea acestei mărimi va putea depinde de suma investiţiilor
agenţilor comerciali (prin generarea şi condiţionarea interesului pentru
produse...), de mărimi care să vină din exteriorul sistemului considerat,
creşterea sau scăderea puterii de cumpărare, a oportunităţilor sau modificarea
legislaţiei, etc.
Analiza dinamicii neliniare a modelului microeconomic
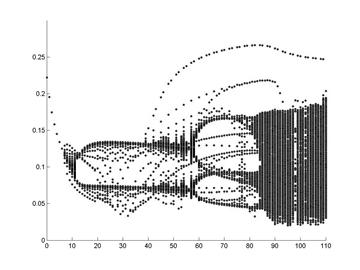
Interesant de arătat că
în funcţie de valoarea coeficientului c avem de a face cu diferite evoluţii
temporale ale sistemului, în Figura 5 fiind reprezentat arborele cu bifurcaţii
realizat pentru cazul ![]() , reprezentând domeniul de valori posibile pe care le poate
lua variabila X funcţie de modificarea coeficientului c.
, reprezentând domeniul de valori posibile pe care le poate
lua variabila X funcţie de modificarea coeficientului c.
|
Fig. 5.
Arborele cu bifurcaţii realizat pentru variaţia coeficientului funcţiei
„treaptă”
|
Se observă că o manifestare haotică este condiţionată de valori mari ale coeficientului c, ceea ce înseamnă o pantă mare a funcţiei treaptă!
Expresiile care vor definii dinamica neliniară a modelului microeconomic sunt:
![]()
![]()
unde a, b şi c sunt parametrii de investiţie (constante
pozitive). Termenul neliniar descrie influenţa investiţiei la timpul n asupra
vânzărilor la timpul (n+1). În figura de mai jos este prezentată evoluţia
temporală a vânzărilor firmei X, pentru setul de coeficienţi de mai sus,
pentru ![]()
|
Fig. 6.
Seria temporală haotică, discretă, a vânzărilor firmei X.
|
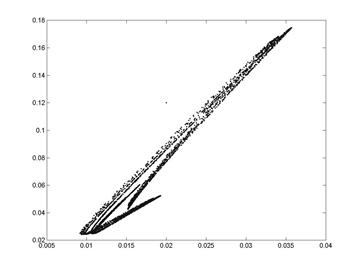
O altă serie de informaţii pot fi obţinute din analiza
traiectoriei dinamice a sistemului în spaţiul stărilor (fazelor). În figura de
mai jos prezentăm, pentru aceeaşi parametrii şi valori iniţiale evoluţia
traiectoriei necontrolate, care este 2D datorită numărului de variabile
libere.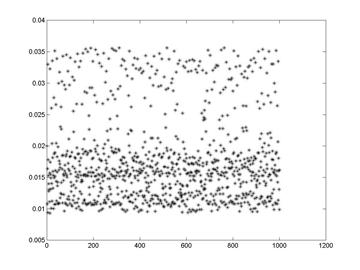
|
Fig. 7.
Evoluţia în spaţiul fazelor pentru sistemul necontrolat
|
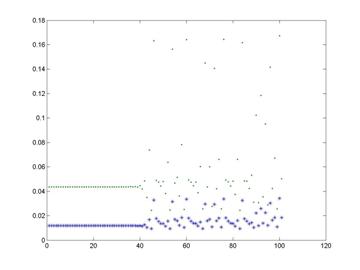
În analiza dinamicii sistemului o altă
caracteristică importantă este acea a poziţiei punctelor fixe, punctele de
iniţializare ale stării sistemului pentru care traiectoria în spaţiul fazelor
este punctuală, sistemul îşi conservă valorile variabilelor. Un calcul sumar
arată o valoare a punctelor fixe ![]() , pentru parametrii prezentaţi mai sus. Existenţa dinamicii
haotice este încă odată pusă în evidenţă de evoluţia temporară a variabilelor
X şi Y, vezi figura de mai jos, unde datorită limitărilor în precizia
, pentru parametrii prezentaţi mai sus. Existenţa dinamicii
haotice este încă odată pusă în evidenţă de evoluţia temporară a variabilelor
X şi Y, vezi figura de mai jos, unde datorită limitărilor în precizia
|
Fig. 8.
Evoluţia variabilelor X şi Y în apropierea punctelor fixe
|
calculelor, punctele fixe găsite sunt aproximative, traiectoria temporară redevenind haotică după un număr de paşi temporari datorită abaterii acestora de la valoarea exactă şi dependenţei exponenţiale a traiectoriilor haotice de valorile iniţiale.
Predictibilitatea haosului este limitată în ultimă instanţă de puternica dependenţa a traiectoriilor viitoare de condiţiile iniţiale.
Să ne referim la
calculul coeficientului Lyapunov care se referă la modul în care două
traiectorii iniţial adiacente, separate de un interval infinitezimal, se
separă în timp, ![]() , adică
, adică
 . Dacă se cunoaşte modul de modelare ala datelor cu anumite
ecuaţii, putem calcula coeficientul Lyapunov local folosind definiţia
sa:
. Dacă se cunoaşte modul de modelare ala datelor cu anumite
ecuaţii, putem calcula coeficientul Lyapunov local folosind definiţia
sa: ![]() . Dacă avem două puncte iniţiale separate prin
. Dacă avem două puncte iniţiale separate prin
![]() ,
, ![]() şi
şi ![]() , şi o hartă 1D,
, şi o hartă 1D,
![]() , atunci după o iteraţie separarea dintre cele două
traiectorii va deveni
, atunci după o iteraţie separarea dintre cele două
traiectorii va deveni ![]() şi deci
şi deci ![]() . Iar coeficientul Lyapunov global prin mediere pe
multe iteraţii
. Iar coeficientul Lyapunov global prin mediere pe
multe iteraţii ![]() . În cazul 2D,
. În cazul 2D, ![]() , atunci când condiţiile iniţiale sunt separate de
, atunci când condiţiile iniţiale sunt separate de
![]() infinitezimal (
infinitezimal (![]() ), şi după o iteraţie traiectoriile sunt separate de
), şi după o iteraţie traiectoriile sunt separate de
![]() şi
şi ![]() , (derivatele parţiale...) şi definim cel mai mare
exponent Lyapunov:
, (derivatele parţiale...) şi definim cel mai mare
exponent Lyapunov: ![]() ,
,
adică
 , cu
, cu ![]() este tangenta direcţiei creşterii maximale (vectorul
tangentă), care evoluează conform
este tangenta direcţiei creşterii maximale (vectorul
tangentă), care evoluează conform
![]() şi este independent de
şi este independent de
![]() după multe iteraţii, deoarece oricare două condiţii
iniţiale se vor orienta pe direcţia întinderii maxime. Aici
după multe iteraţii, deoarece oricare două condiţii
iniţiale se vor orienta pe direcţia întinderii maxime. Aici
![]() semnifică coeficientul Lyapunov de-a lungul direcţiei
maxime de separare a traiectoriilor – primul coeficient Lyapunov.
semnifică coeficientul Lyapunov de-a lungul direcţiei
maxime de separare a traiectoriilor – primul coeficient Lyapunov.
În decursul
iteraţiilor paralelogramul condiţiilor iniţiale (![]() ,
,![]() ) se distorsionează tipic prin alungirea (creşterea
separării traiectoriilor) cu preponderenţă a unei direcţii. Aria
paralelogramului scade, iar el devine mai comprimat, cu direcţia comprimării
schimbându-se la fiecare iteraţie. Această comportare a spaţiului stărilor
(micşorarea volumului şi alungirea...) se datorează termenilor din afara
diagonalei matricei Jacobian
) se distorsionează tipic prin alungirea (creşterea
separării traiectoriilor) cu preponderenţă a unei direcţii. Aria
paralelogramului scade, iar el devine mai comprimat, cu direcţia comprimării
schimbându-se la fiecare iteraţie. Această comportare a spaţiului stărilor
(micşorarea volumului şi alungirea...) se datorează termenilor din afara
diagonalei matricei Jacobian  ,
, ![]() şi
şi ![]() . Pentru a calcula aria paralelogramului după prima iteraţie
să observăm că aria paralelogramului, în cazul în care termenii din afara
diagonalei matricei Jacobian sunt nuli (nu se deformează, aria dreptunghiului
maximal), este
. Pentru a calcula aria paralelogramului după prima iteraţie
să observăm că aria paralelogramului, în cazul în care termenii din afara
diagonalei matricei Jacobian sunt nuli (nu se deformează, aria dreptunghiului
maximal), este ![]() , iar regiunea goală are aria
, iar regiunea goală are aria
![]() , astfel încât aria ce rămâne paralelogramului este
, astfel încât aria ce rămâne paralelogramului este
![]() , determinantul Jacobian-ului, si deci raportul expandării
ariei este
, determinantul Jacobian-ului, si deci raportul expandării
ariei este ![]() . Descriind paralelogramul în termenii direcţiei de maximă
separare a traiectoriilor
. Descriind paralelogramul în termenii direcţiei de maximă
separare a traiectoriilor ![]() , şi a direcţiei perpendiculare pe aceasta,
, şi a direcţiei perpendiculare pe aceasta,
![]() în 2D ... şi
în 2D ... şi![]() în 3D, – al doilea coeficient Lyapunov, în acest
sistem de coordonate rotit
în 3D, – al doilea coeficient Lyapunov, în acest
sistem de coordonate rotit ![]() , adică
, adică ![]() , care generalizează în dimensiuni mai mari suma
coeficienţilor Lyapunov (este logaritmul expansiunii raportului
hiper-volumului) – a nu se uita că
, care generalizează în dimensiuni mai mari suma
coeficienţilor Lyapunov (este logaritmul expansiunii raportului
hiper-volumului) – a nu se uita că
![]() variază pe orbită şi dă suma coeficienţilor locali
Lyapunov. Suma exponenţilor globali se obţine prin medierea
variază pe orbită şi dă suma coeficienţilor locali
Lyapunov. Suma exponenţilor globali se obţine prin medierea
![]() de-a lungul orbitei. Expansiune globală a ariei nu poate să
fie pozitivă pentru o orbită mărginită, dacă sistemul are un atractor atunci
expansiunea trebuie să fie negativă, corespunzând cu o contracţie a
condiţiilor iniţiale pe atractor. Cunoscând determinatul Jacobian-ului şi
primul coeficient Lyapunov se poate dermina uşor, pentru cazul 2D, din
de-a lungul orbitei. Expansiune globală a ariei nu poate să
fie pozitivă pentru o orbită mărginită, dacă sistemul are un atractor atunci
expansiunea trebuie să fie negativă, corespunzând cu o contracţie a
condiţiilor iniţiale pe atractor. Cunoscând determinatul Jacobian-ului şi
primul coeficient Lyapunov se poate dermina uşor, pentru cazul 2D, din
![]() al doilea coeficient Lyapunov.
al doilea coeficient Lyapunov.
Pentru a
determina dacă un sistem este haotic este suficient să se determine cel mai
mare coeficient Lyapunov (![]() ), dacă se doreşte estimarea predictabilităţii medii este
nevoie de toţi coeficienţii pozitivi, altfel este nevoie de întreg spectrul
de exponenţi Lyapunov.
), dacă se doreşte estimarea predictabilităţii medii este
nevoie de toţi coeficienţii pozitivi, altfel este nevoie de întreg spectrul
de exponenţi Lyapunov.
Pentru
calculul numeric a celui mai mate exponent Lyapunov (în orice dimensiune)
trebuie să evaluăm numeric derivata de-a lungul direcţiei de maximă expansiune
şi să-i mediem logaritmul de-a lungul traiectoriei:
![]() alegem condiţiile şi separarea iniţială în orice direcţie,
alegem condiţiile şi separarea iniţială în orice direcţie,
![]() şi
şi ![]() (mărimea vectorului
(mărimea vectorului
![]() ,
, ![]() trebuie să fie mult mai mică decât scala schimbării
curgerii dar de câteva ordine de mărime mai mare decât precizia numerică);
trebuie să fie mult mai mică decât scala schimbării
curgerii dar de câteva ordine de mărime mai mare decât precizia numerică);
![]() iterăm un pas temporal şi determinăm
iterăm un pas temporal şi determinăm
![]() şi
şi ![]() , prima orbită neperturbată şi a doua cea perturbată;
, prima orbită neperturbată şi a doua cea perturbată;
![]() modificăm poziţia celei de a doua traiectorii de la
modificăm poziţia celei de a doua traiectorii de la
![]() la
la ![]() , pentru a menţine orbitele apropiate (la
, pentru a menţine orbitele apropiate (la
![]() ) pe măsură ce lăsăm direcţia să se orienteze pe cea a
maximului expansiunii;
) pe măsură ce lăsăm direcţia să se orienteze pe cea a
maximului expansiunii; ![]() adăugăm mărimea
adăugăm mărimea
![]() la o medie dinamică de-a lungul traiectoriei şi sărim la
pasul
la o medie dinamică de-a lungul traiectoriei şi sărim la
pasul ![]() până când media pare să conveargă. Dacă sistemul este o
curgere, se împarte media rezultată
până când media pare să conveargă. Dacă sistemul este o
curgere, se împarte media rezultată
![]() la pasul temporal h astfel încât unităţile să fie
cele corecte.
la pasul temporal h astfel încât unităţile să fie
cele corecte.
Dacă avem acces
doar la datele directe putem folosii metoda numerică de mai sus cu modificarea
că în loc să perturbăm orbita (![]() ), căutăm în seria temporală punctele apropiate în spaţiul
stărilor ale căror orbite le-am urmărit pentru câţiva paşi temporali sau până
ele se separă prea mult, când alegem alte puncte apropiate, dar în aceeaşi
direcţie
[17].
Algoritmul presupune divergenţa exponenţială dar nu o verifică şi deci nu
poate distinge haosul de zgomot. O altă metodă este aceea de a înainta prin
seria temporală căutând cel mai apropiat punct
), căutăm în seria temporală punctele apropiate în spaţiul
stărilor ale căror orbite le-am urmărit pentru câţiva paşi temporali sau până
ele se separă prea mult, când alegem alte puncte apropiate, dar în aceeaşi
direcţie
[17].
Algoritmul presupune divergenţa exponenţială dar nu o verifică şi deci nu
poate distinge haosul de zgomot. O altă metodă este aceea de a înainta prin
seria temporală căutând cel mai apropiat punct
![]() de fiecare punct
de fiecare punct
![]() din spaţiul împachetat temporal m-dimensional, după care
mediem logaritmului ratei de separaţie a acestor două puncte pe următorii k
paşi temporali
[18].
Cel mai mare coeficient Lyapunov este dat de
din spaţiul împachetat temporal m-dimensional, după care
mediem logaritmului ratei de separaţie a acestor două puncte pe următorii k
paşi temporali
[18].
Cel mai mare coeficient Lyapunov este dat de
![]() , la valori intermediare ale lui k (valorile mici ale
lui k deoarece punctele nu s-au aliniat pe direcţia expansiunii maxime, iar
cele mari deoarece se pot apropia de dimensiunea atractorului şi să cauzeze
deviaţii de la exponenţială), aici
, la valori intermediare ale lui k (valorile mici ale
lui k deoarece punctele nu s-au aliniat pe direcţia expansiunii maxime, iar
cele mari deoarece se pot apropia de dimensiunea atractorului şi să cauzeze
deviaţii de la exponenţială), aici
![]()
În principiu
putem distinge prin această metodă haosul de zgomotul
![]() , unde coeficientul Hurst este
, unde coeficientul Hurst este
![]() (vezi analiza R/S), şi ar trebui să avem
(vezi analiza R/S), şi ar trebui să avem
![]() , adică panta
, adică panta ![]() nu ar trebui să fie constantă, faţă de cazul haosului unde
panta graficului
nu ar trebui să fie constantă, faţă de cazul haosului unde
panta graficului ![]() ar trebui să fie constantă (o regiune substanţială de
proporţionalitate
ar trebui să fie constantă (o regiune substanţială de
proporţionalitate ![]() trebuie să fie evidentă în cazul haosului).
trebuie să fie evidentă în cazul haosului).
Este foarte importantă cunoaşterea sau estimarea coeficienţilor Lyapunov deoarece de valoarea lor depinde modul de evoluţie a sistemului:
• l < 0: indică comportare convergentă către un atractor stabil sau un singur punct fix
• l > 0: indică comportare haotică, deviaţiile iniţiale cresc exponenţial şi sistemul este foarte sensibil la condiţiile iniţiale
• l = 0: indică stabilitate marginală. Valorile lui r cu ®l 0: marchează puncte de bifurcaţie unde un atractor devine instabil şi este înlocuit de unul cu perioadă dublă
• l ® - ¥: exponent divergent marchează orbite superstabile în care deviaţiile (apropiate atractorului) dispar extrem de rapid
Coeficient Lyapunov pentru modelul microeconomic, se calculează plecând de la funcţiile de iteraţie ale hărţii
![]()
![]()
şi este întotdeauna posibil să se scrie o hartă D-dimensională în termenii unei hărţi 1D, proiecţia traiectoriei pe axa de observaţie, folosind termeni întârziaţi ai observabilei, dar în general numărul termenilor întârziaţi depăşesc D).
Matricea Jacobiană (cazul sistemului fără control, de dimensiune 2) este

![]()
![]()
![]()
![]()
De exemplu, pentru setul
de valori iniţiale şi ale coeficienţilor (cu
![]() )
) ![]() , coeficientul
, coeficientul ![]() şi ştiind valoarea determinantului
şi ştiind valoarea determinantului
![]() , găsim valoarea celui de la doilea coeficient
, găsim valoarea celui de la doilea coeficient
![]() .
.
În figurile de mai jos
sunt prezentate suprafeţele de evoluţie a valorilor acestor doi coeficienţi,
pentru setul de coeficienţi listaţi mai sus, pentru condiţii iniţiale
![]() , şi
, şi ![]() .
.
|
Fig. 9.
Suprafeţele de evoluţie a valorilor coeficienţilor Lyapunov 1 şi 2 pentru
sistemul „liber”
|
Se observă că valoarea
principalului coeficient Lyapunov este pozitivă, implicând o comportare
haotică, indiferent de valorile iniţiale de pornire ale iteraţiilor. Dintr-o
analiză similară, funcţie de valorile coeficienţilor, se determină condiţiile
pentru apariţia haosului, care sunt
![]() .
.